Evolutionary multimodal optimization
In applied mathematics, multimodal optimization deals with optimization tasks that involve finding all or most of the multiple (at least locally optimal) solutions of a problem, as opposed to a single best solution. Evolutionary multimodal optimization is a branch of evolutionary computation, which is closely related to machine learning. Wong provides a short survey,[1] wherein the chapter of Shir[2] and the book of Preuss[3] cover the topic in more detail.
Motivation
Knowledge of multiple solutions to an optimization task is especially helpful in engineering, when due to physical (and/or cost) constraints, the best results may not always be realizable. In such a scenario, if multiple solutions (locally and/or globally optimal) are known, the implementation can be quickly switched to another solution and still obtain the best possible system performance. Multiple solutions could also be analyzed to discover hidden properties (or relationships) of the underlying optimization problem, which makes them important for obtaining domain knowledge. In addition, the algorithms for multimodal optimization usually not only locate multiple optima in a single run, but also preserve their population diversity, resulting in their global optimization ability on multimodal functions. Moreover, the techniques for multimodal optimization are usually borrowed as diversity maintenance techniques to other problems.[4]
Background
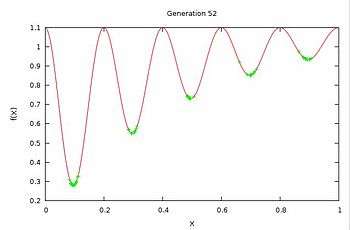
Classical techniques of optimization would need multiple restart points and multiple runs in the hope that a different solution may be discovered every run, with no guarantee however. Evolutionary algorithms (EAs) due to their population based approach, provide a natural advantage over classical optimization techniques. They maintain a population of possible solutions, which are processed every generation, and if the multiple solutions can be preserved over all these generations, then at termination of the algorithm we will have multiple good solutions, rather than only the best solution. Note that, this is against the natural tendency of EAs, which will always converge to the best solution, or a sub-optimal solution (in a rugged, “badly behaving” function). Finding and maintenance of multiple solutions is wherein lies the challenge of using EAs for multi-modal optimization. Niching[5] is a generic term referred to as the technique of finding and preserving multiple stable niches, or favorable parts of the solution space possibly around multiple solutions, so as to prevent convergence to a single solution.
The field of Evolutionary algorithms encompasses genetic algorithms (GAs), evolution strategy (ES), differential evolution (DE), particle swarm optimization (PSO), and other methods. Attempts have been made to solve multi-modal optimization in all these realms and most, if not all the various methods implement niching in some form or the other.
Multimodal optimization using genetic algorithms/evolution strategies
De Jong's crowding method, Goldberg's sharing function approach, Petrowski's clearing method, restricted mating, maintaining multiple subpopulations are some of the popular approaches that have been proposed by the community. The first two methods are especially well studied, however, they do not perform explicit separation into solutions belonging to different basins of attraction.
The application of multimodal optimization within ES was not explicit for many years, and has been explored only recently. A niching framework utilizing derandomized ES was introduced by Shir,[6] proposing the CMA-ES as a niching optimizer for the first time. The underpinning of that framework was the selection of a peak individual per subpopulation in each generation, followed by its sampling to produce the consecutive dispersion of search-points. The biological analogy of this machinery is an alpha-male winning all the imposed competitions and dominating thereafter its ecological niche, which then obtains all the sexual resources therein to generate its offspring.
Recently, an evolutionary multiobjective optimization (EMO) approach was proposed,[7] in which a suitable second objective is added to the originally single objective multimodal optimization problem, so that the multiple solutions form a weak pareto-optimal front. Hence, the multimodal optimization problem can be solved for its multiple solutions using an EMO algorithm. Improving upon their work,[8] the same authors have made their algorithm self-adaptive, thus eliminating the need for pre-specifying the parameters.
An approach that does not use any radius for separating the population into subpopulations (or species) but employs the space topology instead is proposed in.[9]
Multimodal optimization using DE
The niching methods used in GAs have also been explored with success in the DE community. DE based local selection and global selection approaches have also been attempted for solving multi-modal problems. DE's coupled with local search algorithms (Memetic DE) have been explored as an approach to solve multi-modal problems.
For a comprehensive treatment of multimodal optimization methods in DE, refer the Ph.D thesis Ronkkonen, J. (2009). Continuous Multimodal Global Optimization with Differential Evolution Based Methods.[10]
Multimodal optimization using swarm intelligence-based GSO algorithm
Glowworm swarm optimization (GSO) is a swarm intelligence based algorithm, introduced by K.N. Krishnanand and D. Ghose in 2005, for simultaneous computation of multiple optima of multimodal functions.[11][12][13][14] The algorithm shares a few features with some better known algorithms, such as ant colony optimization and particle swarm optimization, but with several significant differences. The agents in GSO are thought of as glowworms that carry a luminescence quantity called luciferin along with them. The glowworms encode the fitness of their current locations, evaluated using the objective function, into a luciferin value that they broadcast to their neighbors. The glowworm identifies its neighbors and computes its movements by exploiting an adaptive neighborhood, which is bounded above by its sensor range. Each glowworm selects, using a probabilistic mechanism, a neighbor that has a luciferin value higher than its own and moves toward it. These movements—based only on local information and selective neighbor interactions—enable the swarm of glowworms to partition into disjoint subgroups that converge on multiple optima of a given multimodal function. Unlike most other evolutionary multimodal optimization algorithms, the property of splitting into sub-groups allows the algorithm to simultaneously converge to local optima of different values, thus making it suitable for solving multiple signal source seeking problems using robots.[15]
See also
References
- ↑ Wong, K. C. (2015), Evolutionary Multimodal Optimization: A Short Survey arXiv preprint arXiv:1508.00457
- ↑ Shir, O.M. (2012), Niching in Evolutionary Algorithms
- ↑ Preuss, Mike (2015), Multimodal Optimization by Means of Evolutionary Algorithms
- ↑ Wong, K. C. et al. (2012), Evolutionary multimodal optimization using the principle of locality Information Sciences
- ↑ Mahfoud, S. W. (1995), "Niching methods for genetic algorithms"
- ↑ Shir, O.M. (2008), "Niching in Derandomized Evolution Strategies and its Applications in Quantum Control"
- ↑ Deb, K., Saha, A. (2010) "Finding Multiple Solutions for Multimodal Optimization Problems Using a Multi-Objective Evolutionary Approach" (GECCO 2010, In press)
- ↑ Saha, A., Deb, K. (2010) "A Bi-criterion Approach to Multimodal Optimization: Self-adaptive Approach " (Lecture Notes in Computer Science, 2010, Volume 6457/2010, 95–104)
- ↑ C. Stoean, M. Preuss, R. Stoean, D. Dumitrescu (2010) Multimodal Optimization by means of a Topological Species Conservation Algorithm. In IEEE Transactions on Evolutionary Computation, Vol. 14, Issue 6, pages 842–864, 2010.
- ↑ Ronkkonen,J., (2009). Continuous Multimodal Global Optimization with Differential Evolution Based Methods
- ↑ K. N. Krishnanand and D. Ghose (2005). Detection of multiple source locations using a glowworm metaphor with applications to collective robotics. IEEE Swarm Intelligence Symposium, Pasadena, California, USA, pp. 84–91,
- ↑ K. N. Krishnanand and D. Ghose. Glowworm swarm optimization for simultaneous capture of multiple local optima of multimodal functions. Swarm Intelligence, Vol. 3, No. 2, pp. 87–124, June 2009.
- ↑ K. N. Krishnanand and D. Ghose. (2008). Theoretical foundations for rendezvous of glowworm-inspired agent swarms at multiple locations. Robotics and Autonomous Systems, 56(7): 549–569.
- ↑ K. N. Krishnanand and D. Ghose. (2006). Glowworm swarm based optimization algorithm for multimodal functions with collective robotics applications. Multi-agent and Grid Systems, 2(3): 209–222.
- ↑ K. McGill and S. Taylor, Robot algorithms for localization of multiple emission sources, ACM Computing Surveys, Vol. 43, Issue 3, April 2011, pp. 15:1 – 15:25
Bibliography
- D. Goldberg and J. Richardson. (1987) "Genetic algorithms with sharing for multimodal function optimization". In Proceedings of the Second International Conference on Genetic Algorithms on Genetic algorithms and their application table of contents, pages 41–49. L. Erlbaum Associates Inc. Hillsdale, NJ, USA, 1987.
- A. Petrowski. (1996) "A clearing procedure as a niching method for genetic algorithms". In Proceedings of the 1996 IEEE International Conference on Evolutionary Computation, pages 798–803. Citeseer, 1996.
- Deb, K., (2001) "Multi-objective Optimization using Evolutionary Algorithms", Wiley (Google Books)
- F. Streichert, G. Stein, H. Ulmer, and A. Zell. (2004) "A clustering based niching EA for multimodal search spaces". Lecture notes in computer science, pages 293–304, 2004.
- Singh, G., Deb, K., (2006) "Comparison of multi-modal optimization algorithms based on evolutionary algorithms". In Proceedings of the 8th annual conference on Genetic and evolutionary computation, pages 8–12. ACM, 2006.
- Ronkkonen, J., (2009). Continuous Multimodal Global Optimization with Differential Evolution Based Methods
- Wong, K. C., (2009). An evolutionary algorithm with species-specific explosion for multimodal optimization. GECCO 2009: 923–930
- J. Barrera and C. A. C. Coello. "A Review of Particle Swarm Optimization Methods used for Multimodal Optimization", pages 9–37. Springer, Berlin, November 2009.
- Wong, K. C., (2010). Effect of Spatial Locality on an Evolutionary Algorithm for Multimodal Optimization. EvoApplications (1) 2010: 481–490
- Deb, K., Saha, A. (2010) Finding Multiple Solutions for Multimodal Optimization Problems Using a Multi-Objective Evolutionary Approach. GECCO 2010: 447–454
- Wong, K. C., (2010). Protein structure prediction on a lattice model via multimodal optimization techniques. GECCO 2010: 155–162
- Saha, A., Deb, K. (2010), A Bi-criterion Approach to Multimodal Optimization: Self-adaptive Approach. SEAL 2010: 95–104
- Shir, O.M., Emmerich, M., Bäck, T. (2010), Adaptive Niche Radii and Niche Shapes Approaches for Niching with the CMA-ES. Evolutionary Computation Vol. 18, No. 1, pp. 97-126.
- C. Stoean, M. Preuss, R. Stoean, D. Dumitrescu (2010) Multimodal Optimization by means of a Topological Species Conservation Algorithm. In IEEE Transactions on Evolutionary Computation, Vol. 14, Issue 6, pages 842–864, 2010.
- S. Das, S. Maity, B-Y Qu, P. N. Suganthan, "Real-parameter evolutionary multimodal optimization — A survey of the state-of-the-art", Vol. 1, No. 2, pp. 71–88, Swarm and Evolutionary Computation, June 2011.
External links
- Multi-modal optimization using Particle Swarm Optimization (PSO)
- Niching in Evolution Strategies (ES)
- Multimodal optimization page at Chair 11, Computer Science, TU Dortmund University
- IEEE CIS Task Force on Multi-modal Optimization
|  | |||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||