Spline interpolation
In the mathematical field of numerical analysis, spline interpolation is a form of interpolation where the interpolant is a special type of piecewise polynomial called a spline. Spline interpolation is often preferred over polynomial interpolation because the interpolation error can be made small even when using low degree polynomials for the spline. Spline interpolation avoids the problem of Runge's phenomenon, in which oscillation can occur between points when interpolating using high degree polynomials.
Introduction
Originally, spline was a term for elastic rulers that were bent to pass through a number of predefined points ("knots"). These were used to make technical drawings for shipbuilding and construction by hand, as illustrated by Figure 1.
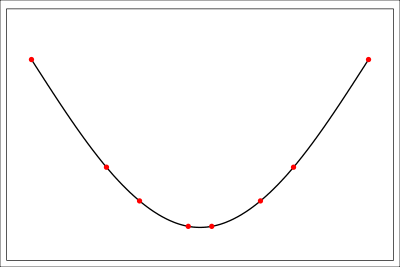
The approach to mathematically model the shape of such elastic rulers fixed by n + 1 knots is to interpolate between all the pairs of knots and with polynomials .




The curvature of a curve is given by:


As the spline will take a shape that minimizes the bending (under the constraint of passing through all knots) both and will be continuous everywhere and at the knots. To achieve this one must have that



This can only be achieved if polynomials of degree 3 or higher are used. The classical approach is to use polynomials of degree 3 — the case of cubic splines.
Algorithm to find the interpolating cubic spline
A third order polynomial for which





can be written in the symmetrical form
-
(1)

where
-
(2)

-
(3)

-
(4)

As

one gets that:
-
(5)

-
(6)

Setting x = x1 and x = x2 respectively in equations (5) and (6) one gets from (2) that indeed first derivatives q′(x1) = k1 and q′(x2) = k2 and also second derivatives
-
(7)

-
(8)

If now (xi, yi), i = 0, 1, ..., n are n + 1 points and
-
(9)

where i = 1, 2, ..., n and are n third degree polynomials interpolating y in the interval xi−1 ≤ x ≤ xi for i = 1, ..., n such that q′i (xi) = q′i+1(xi) for i = 1, ..., n−1 then the n polynomials together define a differentiable function in the interval x0 ≤ x ≤ xn and

-
(10)

-
(11)

for i = 1, ..., n where
-
(12)

-
(13)

-
(14)

If the sequence k0, k1, ..., kn is such that, in addition, q′′i(xi) = q′′i+1(xi) holds for i = 1, ..., n-1, then the resulting function will even have a continuous second derivative.
From (7), (8), (10) and (11) follows that this is the case if and only if
-
(15)

for i = 1, ..., n-1. The relations (15) are n − 1 linear equations for the n + 1 values k0, k1, ..., kn.
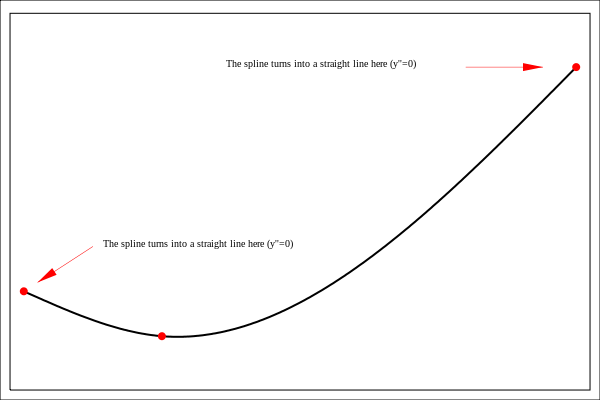
For the elastic rulers being the model for the spline interpolation one has that to the left of the left-most "knot" and to the right of the right-most "knot" the ruler can move freely and will therefore take the form of a straight line with q′′ = 0. As q′′ should be a continuous function of x one gets that for "Natural Splines" one in addition to the n − 1 linear equations (15) should have that


i.e. that
-
(16)

-
(17)

Eventually, (15) together with (16) and (17) constitute n + 1 linear equations that uniquely define the n + 1 parameters k0, k1, ..., kn.
There exist other end conditions: "Clamped spline", that specifies the slope at the ends of the spline, and the popular "not-a-knot spline", that requires that the third derivative is also continuous at the x1 and xN−1 points. For the "not-a-knot" spline, the additional equations will read:


where .

Example
In case of three points the values for are found by solving the tridiagonal linear equation system


with










For the three points

one gets that





In Figure 2 the spline function consisting of the two cubic polynomials and given by (9) is displayed


See also
- Cubic Hermite spline
- Centripetal Catmull–Rom spline
- Discrete spline interpolation
- Monotone cubic interpolation
- NURBS
- Multivariate interpolation
- Polynomial interpolation
- Smoothing spline
- Spline wavelet
Computer code
TinySpline: Open source C-library for splines which implements cubic spline interpolation
External links
- Cubic Spline Interpolation Online Calculation and Visualization Tool (with JavaScript source code)
- Hazewinkel, Michiel, ed. (2001), "Spline interpolation", Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- Dynamic cubic splines with JSXGraph
- Lectures on the theory and practice of spline interpolation
- Paper which explains step by step how cubic spline interpolation is done, but only for equidistant knots.
- Numerical Recipes in C, Go to Chapter 3 Section 3-3.
- A note on cubic splines